360° optics
Many machine vision applications require a complete view of an object surface since many features to be inspected are located on the object sides rather than on top. Most cylindrical objects such as bottles and containers, as well as many kinds of mechanical parts, require an inspection of the side surfaces to detect scratches and impurities or to read barcodes or, again, to ensure that a label has been printed correctly.
In these cases, the most common approach is to use multiple cameras (usually 3 or 4) in order to achieve several side views of the part, in addition to the top view. This solution, besides increasing the cost of the system, often creates a bottleneck in the system performances, since the electronics or software must process different images from different cameras simultaneously. In other cases, vision engineers prefer to scan the outer surface with line scan camera systems.
This approach also shows many technical and cost disadvantages: the object must be mechanically rotated in the FOV which also affects the inspection speed; moreover, line-scan cameras require very powerful illumination. Also, the large size of linear detectors increases the optical magnification of the system, thus reducing field depth.


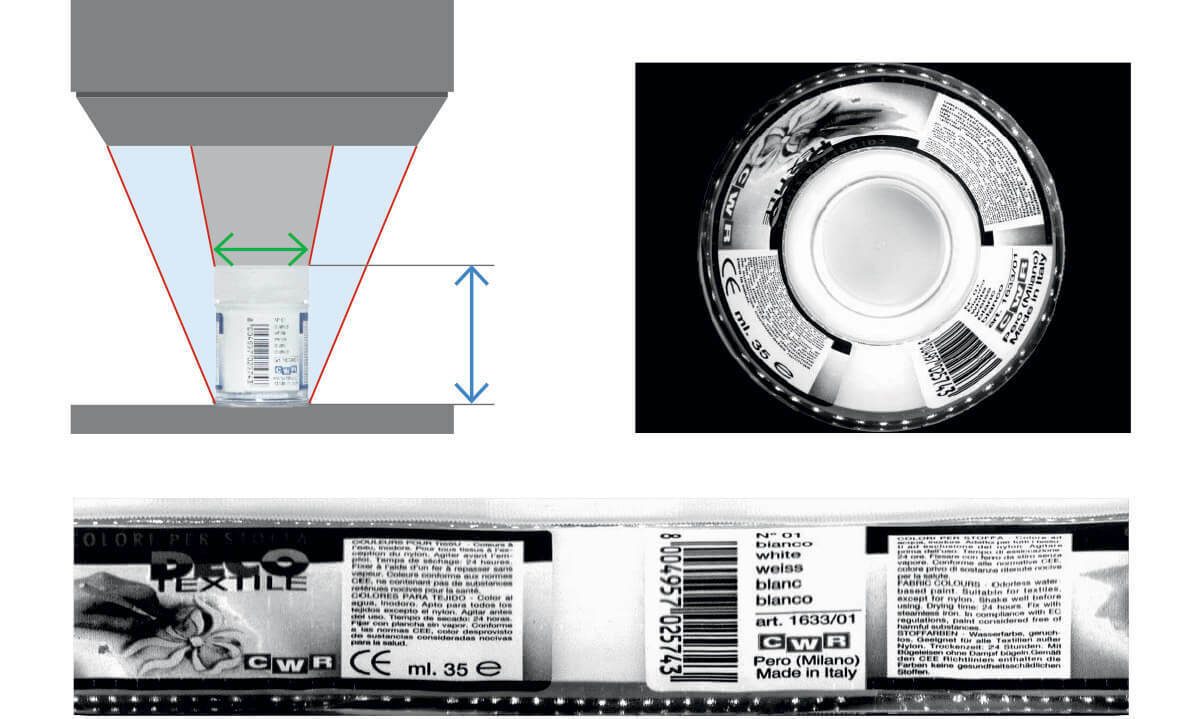
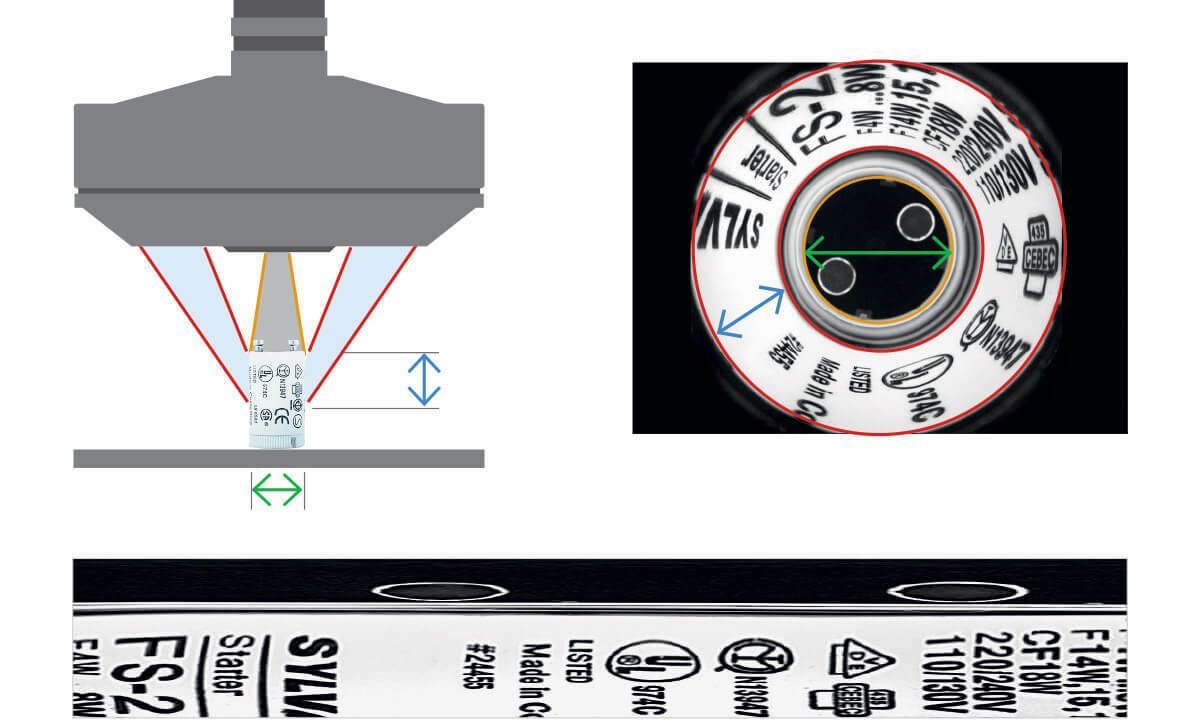
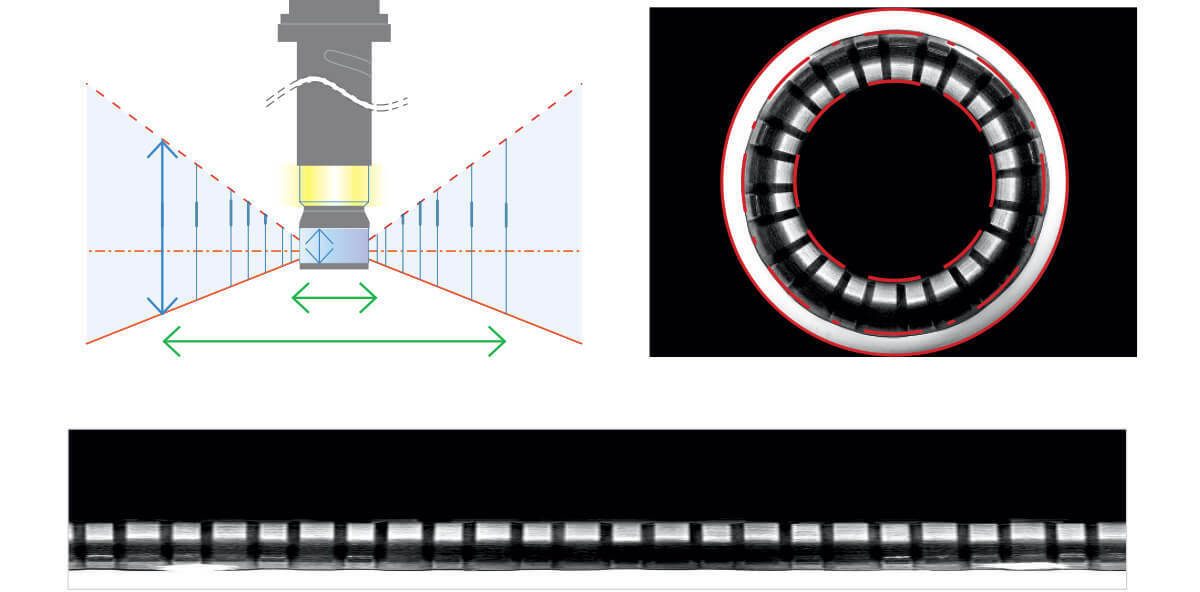
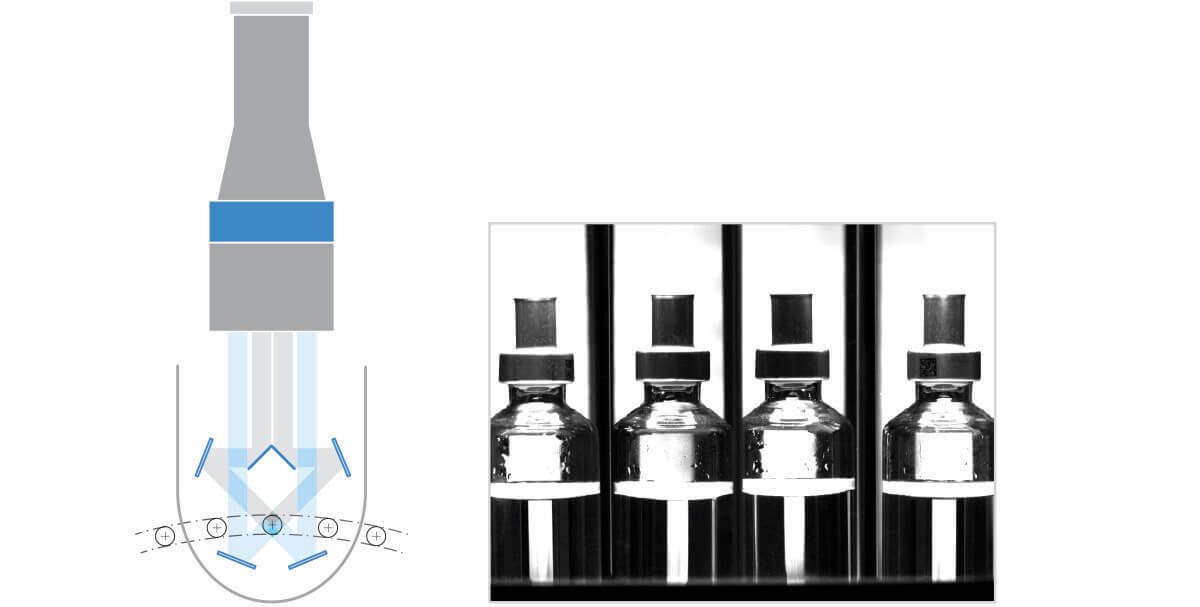
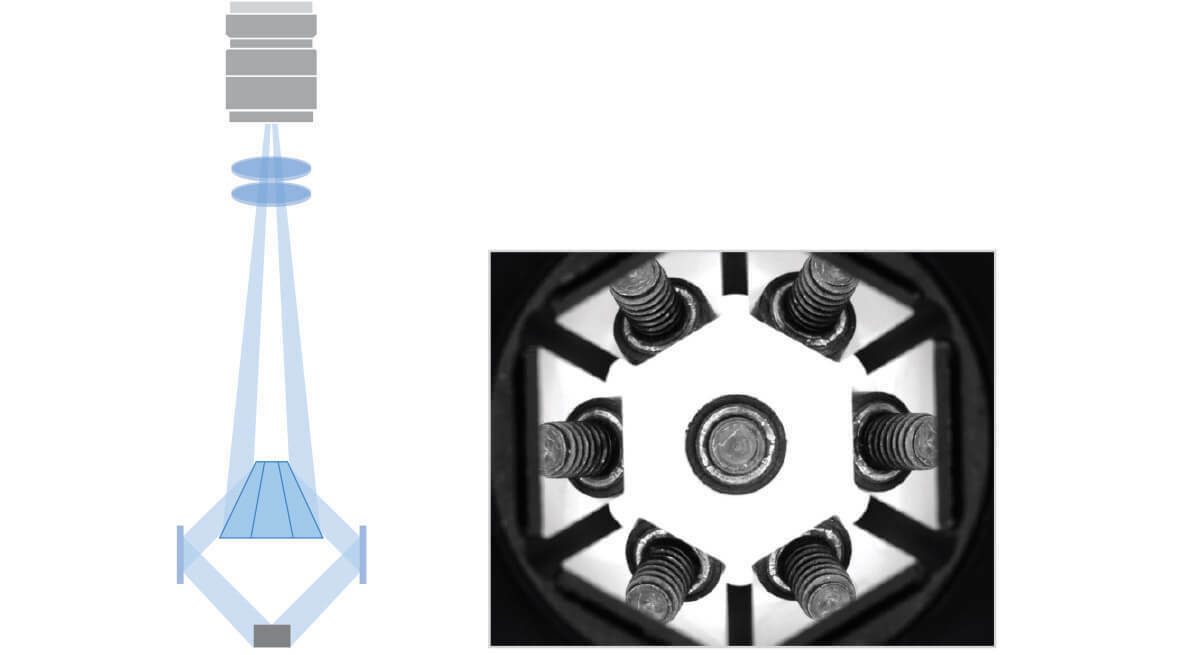
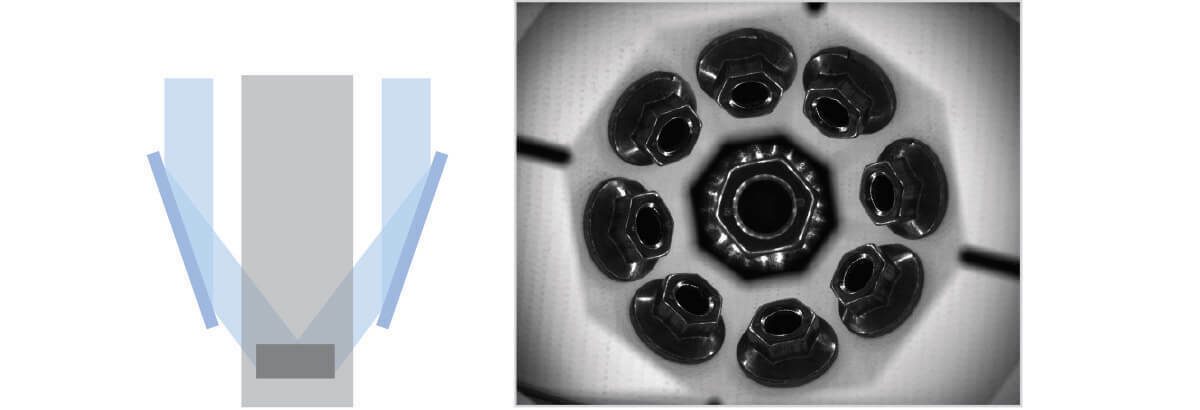
The 360° optics category encompasses different optical solutions that capture rays diverging from the object (see Fig. 37), thus imaging not only the object surface in front of the lens but also the object’s lateral surface (see optical diagram below).
The following images illustrate the working principle applied to a pericentric lens (PC), a catadioptric lens (PCCD), a pinhole lens (PCHI) and a boroscope lens (PCPB). Other 360° optical solutions combine telecentric optics and mirror arrays, allowing you to get a complete view of a sample with just one camera (TCCAGE, PCPW, and PCMP series).