Optics basics
The basic purpose of a lens of any kind is to collect the light scattered by an object and recreate an image of the object on a light-sensitive ‘sensor’ (usually CCD or CMOS based).
A certain number of parameters must be considered when choosing optics, depending on the area that must be imaged (field of view), the thickness of the object or features of interest (depth of field), the lens to object distance (working distance), the intensity of light, the optics type (telecentric/entocentric/pericentric), etc.
The following list includes the fundamental parameters that must be evaluated in optics
- Field of View (FoV): total area that can be viewed by the lens and imaged onto the camera sensor.
- Working distance (WD): object to lens distance where the image is at its sharpest focus.
- Depth of Field (DoF): maximum range where the object appears to be in acceptable focus.
- Sensor size: size of the camera sensor’s active area. This can be easily calculated by multiplying the pixel size by the sensor resolution (number of active pixels in the x and y direction).
- Magnification: ratio between sensor size and FoV.
- Resolution: minimum distance between two points that can still be distinguished as separate points. Resolution is a complex parameter, which depends primarily on the lens and camera resolution.
Field of View & Working Distance

In order to accurately describe the characteristics of a vision system, machine vision experts have defined some common terms:
The Field of View (often abbreviated FoV) is the dimensional area that can be viewed by the lens and imaged onto the camera sensor. In the most basic terms, the FoV is a real-world value that gives us the dimensions of the area that we can capture with our vision system.
Typically, this is one of the first parameters that is defined in a machine vision task – the user needs to know the area that must be acquired in order to capture all the necessary information for the application’s final task. Often, the application field of view is slightly larger than the dimensions of the object or feature that is being inspected or measured.
The achievable field of view that can be captured by an already-assembled vision system is influenced by both the system’s optic and the camera’s image sensor. If you would like to learn more about how you can calculate this value, be sure to follow our social channels, as we will be going over some of the standard machine vision calculations in specific videos.
Another of the most common machine vision terms is working distance (abbreviated WD), which is the object-to-lens distance where the image is at its sharpest focus. Put simply, this is another real-world value that gives us the exact distance between the final edge of the vision system’s lensing and the plane of optimal focus, which is where we want to place our inspection sample. An application’s working distance could be limited by footprint limitations or by the specifications of the selected lens.
Lens approximations and equations
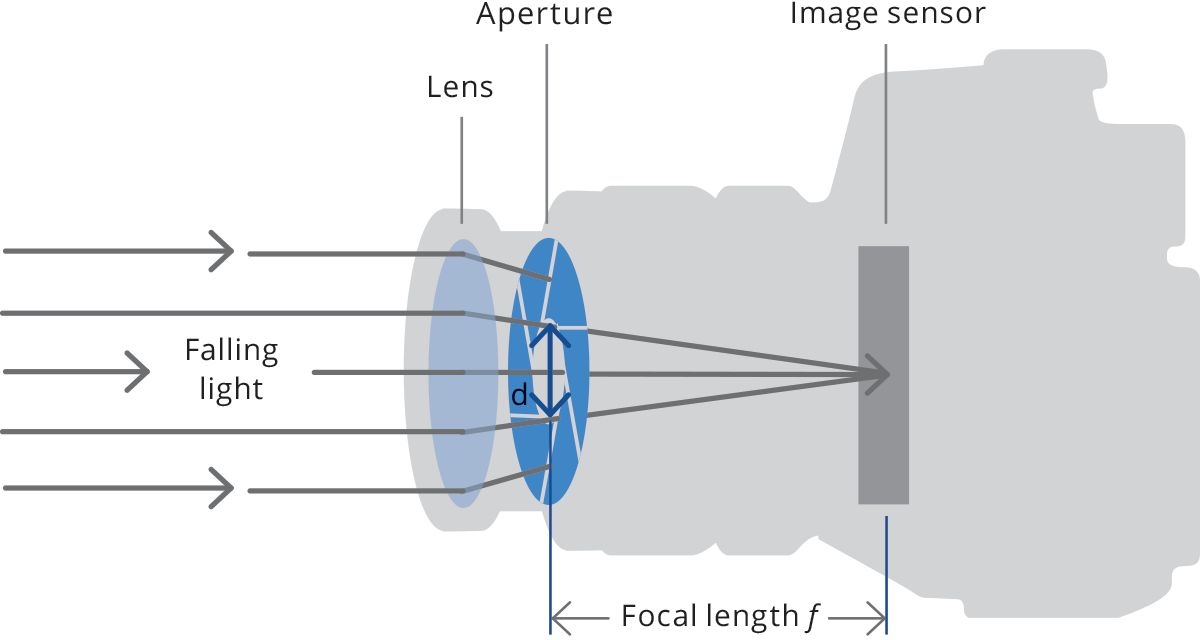
The main features of most optical systems can be calculated with a few parameters, provided that some approximation is accepted. The paraxial approximation requires that only rays entering the optical system at small angles with respect to the optical axis are taken into account. The thin lens approximation requires the lens thickness to be considerably smaller than the radii of curvature of the lens surfaces: it is thus possible to ignore optical effects due to the real thickness of the lenses and to simplify ray-tracing calculations. Furthermore, assuming that both object and image space are in the same medium (e.g. air), we get the following fundamental equation:
where s (s’ ) is the object (image) position with respect to the lens, customarily designated by a negative (positive) value, and f is the focal length of the optical system (cf. Fig. 1). The distance from the object to the front lens is called working distance, while the distance from the rear lens to the sensor is called back focal distance. Henceforth, we will be presenting some useful concepts and formulas based on this simplified model, unless otherwise stated.

Industrial Camera Mount Types

The choice of industrial camera mount type is a critical consideration in designing a vision system, as it directly impacts factors such as stability, flexibility, and compatibility with other components. Industrial cameras can come with many different mount types, each with its own advantages and suitability for different applications.
Arguably the most prevalent mount type for industrial cameras is the C-mount, characterized by a 1-inch (or 25.4 mm) thread diameter and a 17.526 mm flange focal distance which is the distance from the joint of the camera and lens to the digital sensor. Since it is one of the most common mount types, C-mount cameras offer versatility and compatibility with a wide range of lenses, including auto-focusing lenses and other types of specialized optics. This flexibility allows for easy adaptation to different imaging requirements, such as variable working distances or field of view adjustments. Additionally, C-mount cameras are commonly used in machine vision applications due to their widespread availability and standardized interface, making them well-suited for integration into existing systems.
Another common mount type is the CS-mount, similar to the C-mount but with a shorter flange focal distance of 12.5 mm. CS-mount cameras are typically used in applications where space constraints or weight considerations are critical, as they allow for more compact camera designs. However, it is important to note that CS-mount cameras should not be paired with C-mount lenses unless an adapter is used to make up for the difference in back focal distance.
F-mount, a bayonet-style mount developed by Nikon for its 35 mm format cameras, is commonly used with larger sensors such as full-frame or line-scan cameras. While lenses can be easily swapped out thanks to the bayonet mount, back focal adjustment is not possible with this mount. Mxx-mounts, defined by their diameter (e.g. M72, M42), thread pitch (e.g. 1 mm, 0.75 mm) and flange focal distance, are another alternative to the F-mount for larger sensors.
For specialized applications, industrial cameras may utilize fixed mounts or custom mounting solutions tailored to specific environments or mounting requirements. Due to their custom nature, these types of mounts are much less versatile and are therefore less common.
In summary, the choice of industrial camera mount type is essential in designing a vision system optimized for performance, reliability, and adaptability to diverse application needs. Whether opting for the versatile C-mount, the compact CS-mount, or custom mounting solutions, selecting the appropriate mount type ensures seamless integration and optimal functionality of the industrial camera within the vision system.
Camera mounts
Different mechanical mounting systems are used to connect a lens to a camera, ensuring both good focus and image stability. The mount is defined by the mechanical depth of the mechanics (flange focal distance), along with its diameter and thread pitch (if present). It’s important that the lens flange focal distance and the camera mount flange distance are exactly the same, or focusing issues may arise. The presence of a threaded mechanism allows some adjustment to the back focal distance if needed. For example, in the Opto Engineering® PCHI series lenses, the back focal adjustment is needed to adjust the focus for a different field of view.

C-mount is the most common optics mount in the industrial market. It is defined by a flange focal distance of 17.526 mm, a diameter of 1” (25.4 mm) with 32 threads per inch.
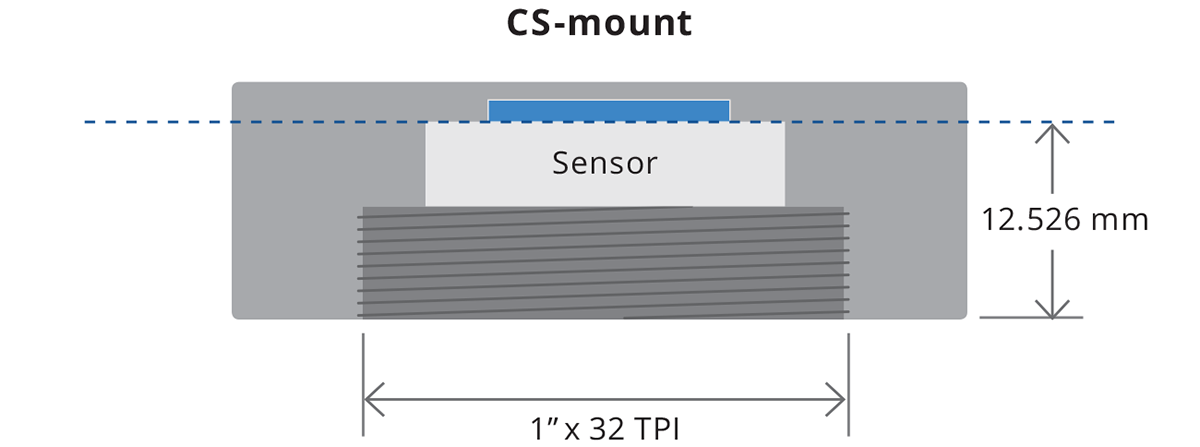
CS-mount is a less popular and 5 mm shorter version of the C-mount, with a flange focal distance of 12.526 mm. A CS-mount camera presents various issues when used together with C-mount optics, especially if the latter is designed to work at a precise back focal distance.
F-mount is a bayonet-style mount originally developed by Nikon for its 35 mm format cameras and is still found in most of its digital SLR cameras. It is commonly used with bigger sensors, e.g. full-frame or line-scan cameras. Lenses can be easily swapped out thanks to the bayonet mount, but no back focal adjustment is possible.
Mxx-mounts are different types of camera mounts defined by their diameter (e.g. M72, M42), thread pitch (e.g. 1 mm, 0.75 mm) and flange focal distance. They are a common alternative to the F-mount for larger sensors.
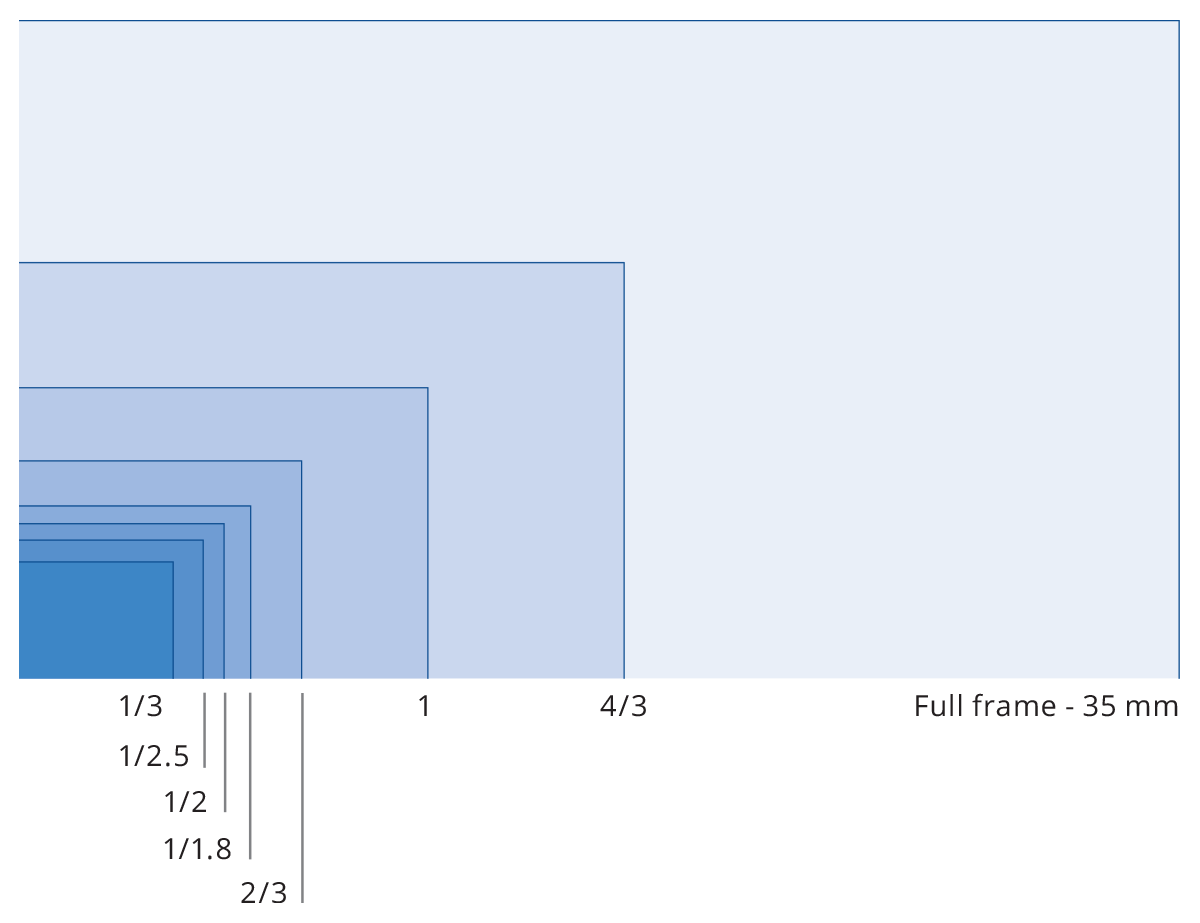
Each camera mount is more commonly used with certain camera sensor formats. The most typical sensor formats are listed below. It is important to remember that these are not absolute values – i.e. two cameras listed with the same sensor format may differ substantially from one another in terms of aspect ratio (even if they have the same sensor diagonal). For example, the Sony Pregius IMX250 sensor is listed as 2/3” and has an active area of 8.45 mm x 7.07 mm. The CMOSIS CMV2000 sensor is also listed as 2/3” format but has an active area of 11.26 mm x 5.98 mm.
Common line scan sensors formats:
| 2048 px x 10 µm | 2048 px x 14 µm | 4096 px x 7 µm | 4096 px x 10 µm | 7450 px x 4.7 µm | 6144 px x 7 µm | 8192 px x 7 µm | 12288 px x 5 µm |
| 20.5 mm | 28.6 mm | 28.6 mm | 35 mm | 41 mm | 43 mm | 57.3 mm | 62 mm |
Common area scan sensors formats:
| Sensor type | Diagonal | Width | Height |
|---|---|---|---|
| (mm) | (mm) | (mm) | |
| 1/3″ | 6.000 | 4.800 | 3.600 |
| 1/2.5″ | 7.182 | 5.760 | 4.290 |
| 1/2″ | 8.000 | 6.400 | 4.800 |
| 1/1.8″ | 8.933 | 7.176 | 5.319 |
| 2/3″ | 11.000 | 8.800 | 6.600 |
| 1″ | 16.000 | 12.800 | 9.600 |
| 4/3″ | 22.500 | 18.800 | 13.500 |
| Full frame - 35 mm | 43.300 | 36.000 | 24.000 |
Back focal length adjustment
Many cameras are found not to respect the industrial standard for C-mount (17.52 mm), which defines the flange-to-detector distance (flange focal length). Besides all the issues involved with mechanical inaccuracy, many manufacturers don’t take into the due account the thickness of the detector’s protection glass which, no matter how thin, is still part of the actual flange to detector distance.
This is why a spacer kit is supplied with Opto Engineering® telecentric lenses including instructions on how to tune the back focal length at the optimal value.
Focal length
For common optical systems, in thin lens approximation, the focal
length is the distance over which collimated rays coming from infinity
converge to a point on the optical axis.

The focal length is a typical characteristic of an optical system. It is a measure of how strongly the system converges or diverges rays of light. If collimated rays converge to a physical point, the lens is said to be positive (convex), whereas if rays diverge the focus point is virtual and the lens is said to be negative (concave). All optics used in machine vision applications are overall positive, i.e. they focus incoming light onto the sensor plane. CCTV lenses are commonly identified by their focal length, expressed in millimeters (12mm, 25mm, 35mm, etc.).

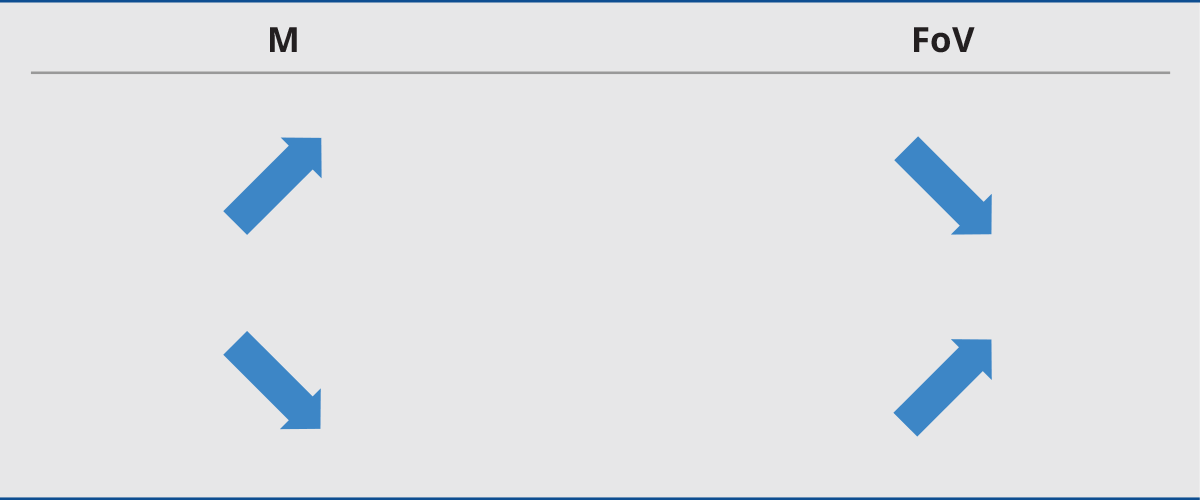
For optical systems used in machine vision, in which rays reflected from a faraway object are focused onto the sensor plane, the focal length can be also seen as a measure of how much area is imaged on the sensor (Field of View): the longer the focal length, the smaller the FoV and vice versa (this is not completely true for some particular optical systems, e.g. in astronomy and microscopy).

The focal length and the focus plane coincide only when the object is placed at an infinite distance, indeed beams from a point on the object can be considered as parallel. When instead the distance from the object is ‘short’ (rule of thumb: <10x Focal length), we are in macro mode and the focus plane is placed further away from the optical system compared to the focal length.

Magnification and field of view
The magnification M of an optics describes the ratio between image (h’) and object size (h)
A useful relationship between working distance (s), magnification (M) and focal length (f) is the following:
Macro and telecentric lenses are designed to work at a distance comparable to their focal length (finite conjugates), while fixed focal length lenses are designed to image objects located at a much greater distance than their focal length (infinite conjugates). It is thus convenient to classify the first group by their magnification, which makes it easier to choose the proper lens given the sensor and object size, and the latter by their focal length.
Since fixed focal length lenses also follow the previous equation, it is possible to calculate the required focal length given the magnification and working distance, or the required working distance given the sensor size, field of view and focal length, etc. (some examples are given at the end of this section). For macro and telecentric lenses instead, the working distance and magnification are typically fixed.
The importance of Magnification

Have you ever wondered how we magnify small objects to reveal intricate details? Or perhaps you’re curious about how we capture such expansive fields of view from considerable distances. As we all know, magnification is the process of enlarging an object to make it appear larger than its true size. In machine vision, magnification is the ratio between sensor size and field of view. With higher magnification, we are able see intricate details of an object.
However, magnification isn’t just for small objects. In ecology, using a fixed focal length lens allows us to magnify vast expanses of land, bringing distant trees and mountains into sharp focus.
In machine vision, magnification plays a crucial role in quality inspection processes. It enables machine vision systems to detect defects, identify features, and perform precise measurements with accuracy and reliability.
Magnification also enhances image clarity and resolution, enabling the system to differentiate between fine details and anomalies. This capability is critical for quality control, product inspection, and other industrial applications that demand precision and consistency.
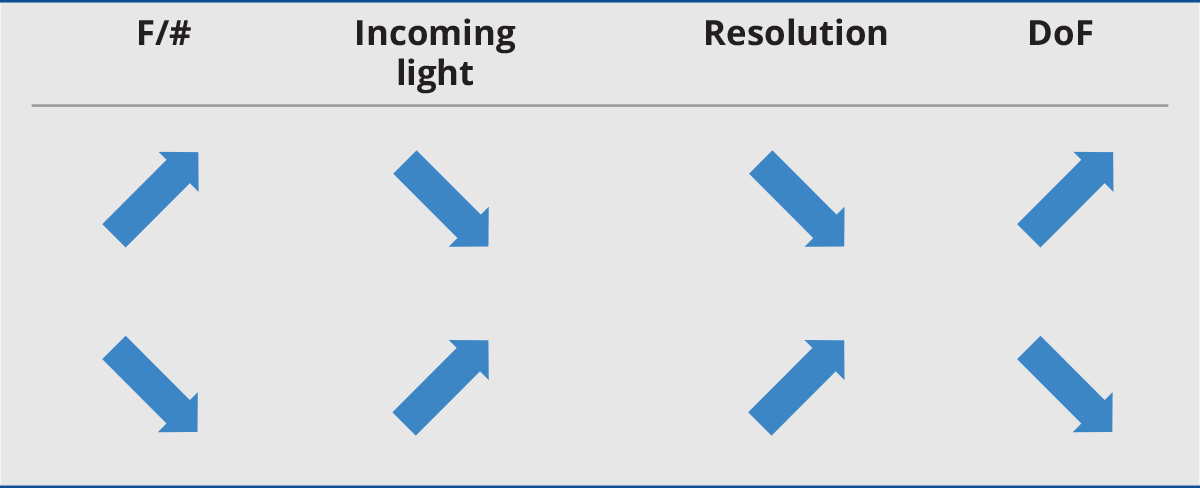
F/# and depth of field
Every optical system is characterized by an aperture stop, that determines the amount of light that passes through it. For a given aperture diameter d and focal length f we can calculate the optics F-number:
Typical F-numbers are F/1.0, F/1.4, F/2, F/2.8, F/4, F/5.6, F/8,
F/11, F/16, F/22, etc. Every increment in the F-number (smaller
aperture) reduces incoming light by a factor of 2. The given definition
of F-number applies to fixed focal length lenses where the object is
located ‘at infinity’ (i.e. a distance much greater than its focal
length). For macro and telecentric lenses where objects are at a closer
distance, instead, the working F/# (wF/#)is used. This is defined as:
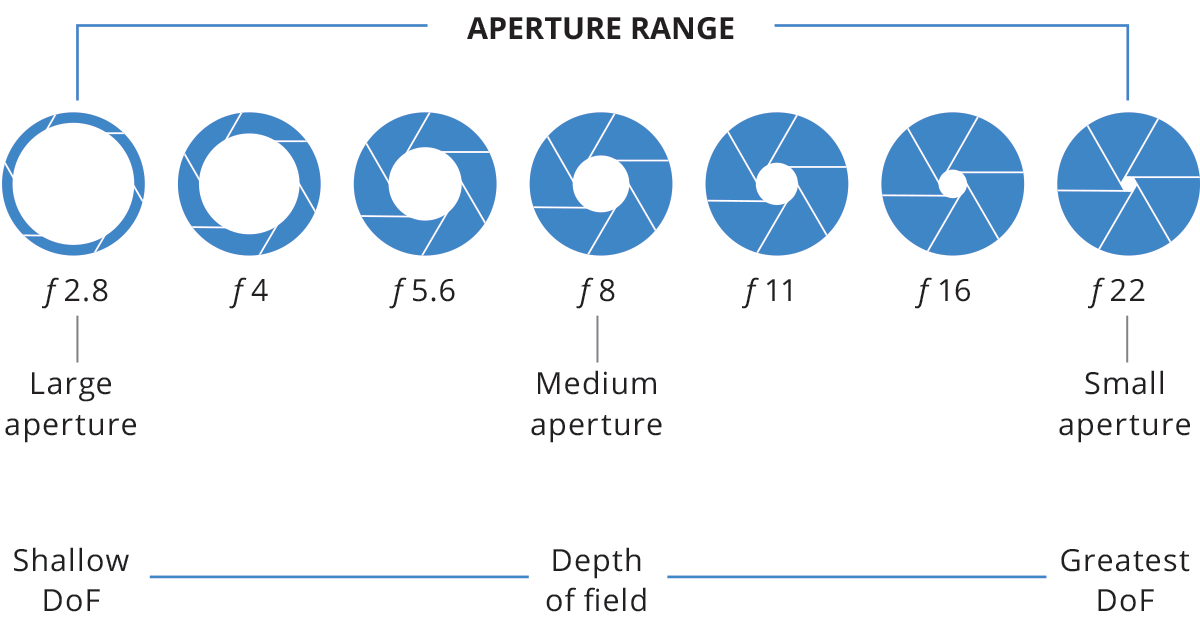
The F-number affects the optics depth of field (DoF), that is the range between the nearest and farthest location where an object is acceptably in focus. Depth of field is quite a misleading concept because physically there is one and only one plane in object space that is conjugate to the sensor plane. However, being mindful of diffraction, aberration and pixel size, we can define an “acceptable focusing distance” from the image conjugate plane, based on subjective criteria. For example, for a given lens, the acceptable focusing distance for a precision gauging application requiring a very sharp image is smaller than for a coarse visual inspection application.
A common F-number value is F/8 since smaller apertures could give rise to diffraction limitations, while lenses with larger apertures are more affected by optical aberrations and distortion. A rough estimate of the field depth of telecentric and macro lenses (or fixed focal length lenses used in macro configuration) is given by the following formula:
where p is the sensor pixel size (in microns), M is the lens magnification and k is a dimensionless parameter that depends on the application (reasonable values are 0.008 for measurement applications and 0.015 for defect inspection). For example, taking p = 5.5 µm and k = 0.015, a lens with 0.25X mag and WF/# = 8 has an approximate DoF = 10.5 mm.
Depth of Field, the key to obtain sharp images

Have you ever wondered why some photographs have a beautifully blurred background while others keep everything sharply in focus?
This phenomenon is known as depth of field, and it plays a crucial role in the world of machine vision. Depth of field refers to the maximum range of distance an object appears to be in acceptable focus. In machine vision applications, achieving the correct depth of field is essential for accurately measuring and analyzing images.
By adjusting parameters such as aperture size, focal length, and working distance, you can modify the depth of field to suit specific inspection requirements. For example, a shallow depth of field is ideal for highlighting specific features or defects on objects, while a larger depth of field ensures that an entire object will remain in focus.
In manufacturing industries like automotive, pharmaceutical and semiconductor, precise DoF is critical to their machine vision systems. Liquid lens solutions can help you meet the DoF requirements for a given vision task. They can provide added flexibility, enhance quality inspection processes, improve efficiency and ensure product consistency.